Auteur archief: henk uyttenhove

Verslag bezoek Cozmix Brugge (Beisbroek)
Gisterenavond was ik met mijn schoonfamilie in het observatorium Cozmix in Brugge. (https://www.cozmix.be/nl)
Dit observatorium werd in de jaren 80′ opgericht in een prachtige bosrijke omgeving.
Tijdens de dag kan je leuke fietsritten in de omgeving maken en op het terras van het cafe naast het observatorium genieten van een hapje en drankje.
Zo ontdekten we ook deze locatie en hadden de plannen gesmeed om eens terug te komen wanneer het observatorium open is.
Hieronder een kort verslagje met enkele indrukken. Happy reading

Gisterenavond was het moment van de geplande uitstap.
Via een draaitrap ga je naar het 3de verdiep waar je een voorstelling hebt met foto’s en doe-materiaal evenals een planetarium waar je in een kleine koepelzaal kan kijken naar verschillende voorsteliingen zoals het ontstaan van de aarde of een begeleide voorstelling van wat te zien valt deze vanavond in de ruimte. (stellarium op hormonen) Dat wordt door een 4K projector gestuurd, waarbij je ook interactieve beelden kan bekijken, tijdens de sterrenwandeling. Een leuke ervaring.
De originele planetarium projector is er nog, maar lijkt niet meer in gebruik.

Na de voorstelling gaat het dan nog hoger via de draaitrap naar de telescoopzaal. Hier zien we een combinatie van 3 telescopen waarbij een 20 cm refractor, een 30 cm Schmidt-Cassegrain en een Lunt refractor voor H-alfa. De telescopen zijn nog met de hand gemaakt en vooral voor een SC vind ik dat toch wel opmerkelijk. De koepel zelf is nog van lokaal hout gemaakt waarbij elke plankje met de hand op maat werd gemaakt. De exacte specificaties van de telescoop heb ik niet kunnen vinden, maar de refractor leek me een F15 (dus 3m). De SC heeft een dauwkap maar de presentator gaf aan dat beide dezelfde focal lengte hebben, wat visueel wat zou kunnen kloppen.
Dat maakt de SC een 3000/30 = F10.
De observaties waren de maan -> jupiter -> de maan daar de andere gekende objecten buiten het gezichtsveld zaten en er geen perfecte duisternis was. Alles sluit om 22u dus we zitten nog een stuk in de schemerzone.
Wat me vooral opviel is hoe verwend we zijn geworden. Ik was eigenlijk echt ontgoocheld in de kwaliteit van beide telescopen. Deze zijn wel 40 jaar oud, maar mijn oude C8 (dus een Schmidt-Cassegrain van 20 cm f10) van dezelfde leeftijd, gaf zeker even goede beelden zelf misschien beter. Stof op de spiegels/lens of slechte oculair? Eigenlijk met een MAK127 of groter, heb je betere details op de maan. De refractor was, ondanks zijn omvang, ook niet in staat om zeer goed de manen van jupiter te onderscheiden.
Toch was de schoonfamilie zwaar onder de indruk en ik verwijt mijn kritiek dan ook gewoon aan teveel verwachtingen en te verwend.
Zeker een aanrader voor de familie maar wegens locatie in de bossen en geen drankmogelijkheid, kan je dit best inpassen met een bezoek aan Brugge.


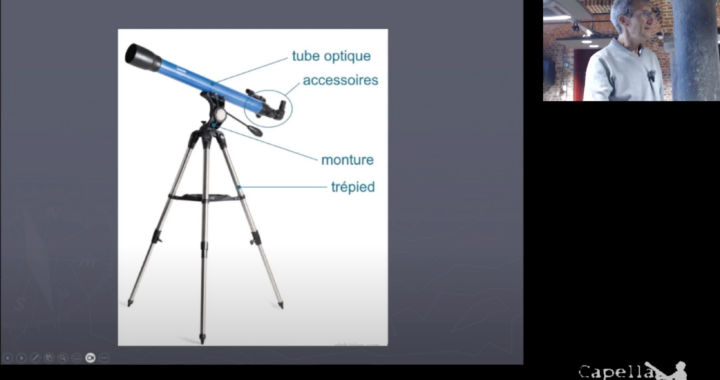
Collimatie-avond
Iedereen kent het probleem, niet iedereen kent de oplossing maar iedereen heeft er wel zijn mening over. Dat is de beschrijving van collimatie.
Tijdens de doe-vergadering op dinsdag hadden we een sessie collimatie en kon iedereen zijn telescoop meenemen voor een workshop rond collimatie.
De eerste telescoop was een spiegeltelescoop op een dobson voet. Een eerste poging was een visuele collimatie op zicht. Deze collimatie is natuurlijk maar een instap en al snel werd overgeschakeld naar een meer nauwkeurige instelling.
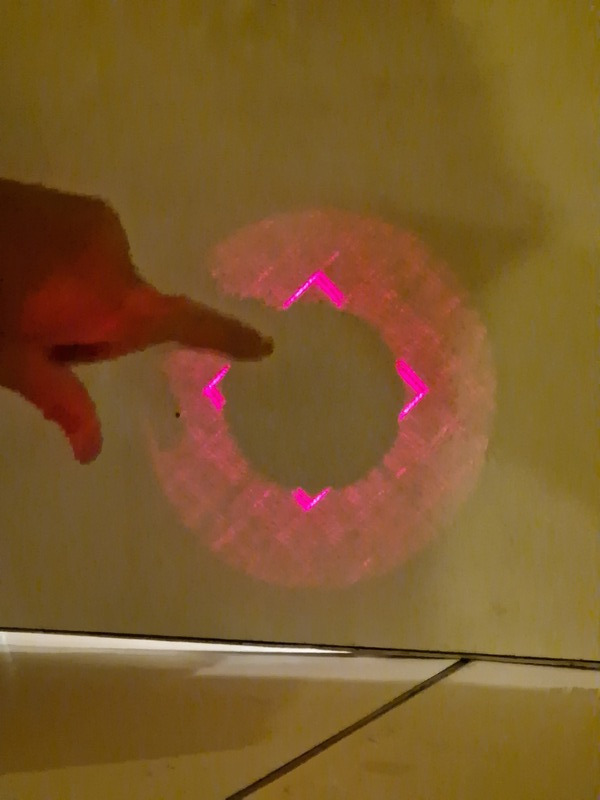
Omdat alle materiaal aanwezig was, werd eerst de positie van de vangspiegel gecontroleerd met een concentric collimator. Hierbij plaats je een stuk papier voor de primaire spiegel en kijk je dus naar de secondaire spiegel via de concentric collimator. Je ziet hierdoor of de secondaire op de juiste plaats staat.
De volgende stap is dan een laser collimator waarbij we eerst kijken langs de open zijde of de laster in de donut van de hoofdspiegel valt. We regelen via de schroeven van de secondaire spiegel. Als dat in orde is, dan kijken we naar de roos op de lastercollimator en regelen we de secondaire spiegel tot de teruggekaatste laser verdwijnt in het midden.
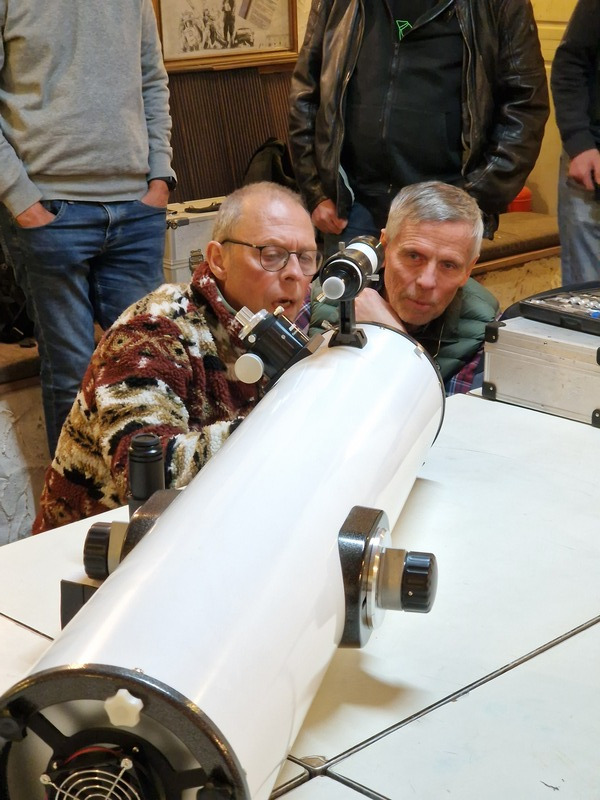
De tweede telescoop is een grotere uitdaging. Een RC6 of dus ritchey chretien is een telescoop design waarbij je twee hyperbolic spiegels hebt waarbij via een gat in de primaire spiegel de focuser aan de achterzijde gemonteerd zit. Door de speciale spiegels is de telescoop vrij van chromatische vervorming en zijn de sterren scherp tot in de hoeken, maar dat komt met de kost van een moeilijke collimatie.
Gunther heeft 2 jaar lang geoeffend op zijn RC6 en kan nu zijn ervaring delen tijdens de vergadering. Hierbij zweert Gunther bij een TSRCKOLLI collimator waarbij je eerst de secondaire spiegel moet instellen en dan de primaire spiegel.
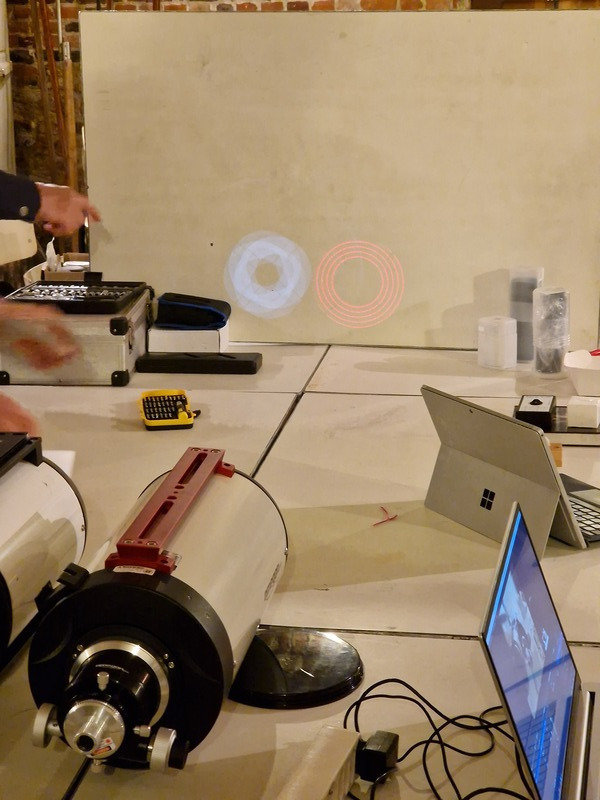
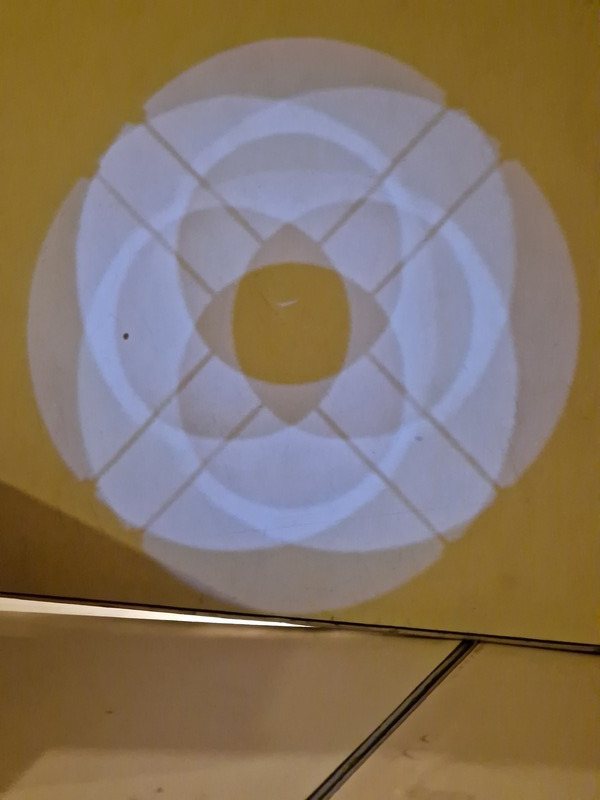
Na visueel instellen, wordt met een Howie Glatter met holographic projectie gecontroleerd of alles goed staat. De nieuwe RC6 Omegon Pro lijkt na controle redelijk goed ingesteld te zijn, maar is nog niet perfect. De TS RC6 van Gunther is voorzien van een tilt plaat.
Deze tiltplaat zorgt ervoor dat je de focuser los van de primaire spiegel nog wat kan bijsturen waardoor deze perfect gecollimeerd kan worden.
Na de collimatie worden andere collimatie-tools gebruikt om te controleren hoe ze reageren met de RC.
Intussen is de tiltplaat al besteld en wordt ook al naar de nieuwe TSRCKOLLI gekeken.
Bij ontvangst van de tiltplaat, kan de collimatie herbeginnen. 😉





Seestar S50 en zonnefotografie
Zonnefotografie vraagt typisch gespecialiseerd materiaal maar met de Seestar S50 komt er ook een zonnefilter. Daarom was mijn vraag hoever je kan gaan met de Seestar. Is de Seestar in staat details van de zon te tonen?
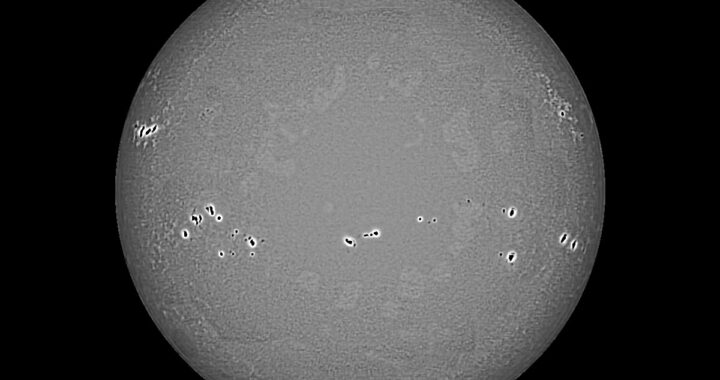
De typische foto van de Seestar die je overal kan vinden is zoals hieronder.
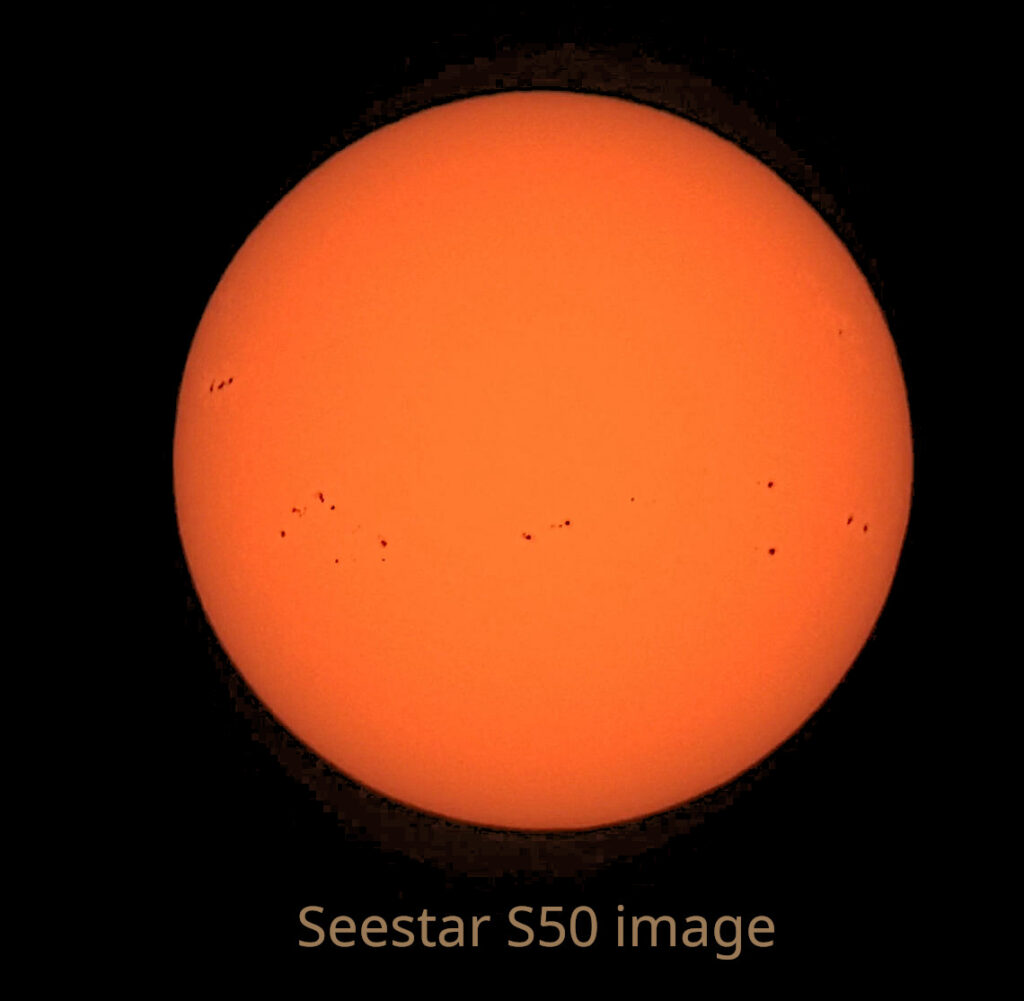
Je kan in de standaard foto van de Seestar de zonnevlekken zien, maar als je wat meer in detail kijkt, kan je ook rond de zonnevlekken wat structuur zien. Het scherpstellen heb ik wel wat moeten helpen door in de applicatie enkele zonnevlekken aan te duiden en dan een autofocus te starten. Resultaat is niet slecht.
Toch vroeg ik me af of het niet mogelijk was om meer uit de Seestar te halen. Daarom heb ik enkele filmpjes genomen waarbij ik dan een manuele stacking kan doen. Hierbij had ik opnames met doel de zonnevlekken en ook voor de zonnevlammen maar die laatste krijg ik niet uit de opnames wegens ofwel afwezig ofwel te zwak tov zonnecirkel.
De procedure is download van Seestar, PIPP voor convertie naar AVI, stacking met Autostakkert en dan finale stretching met Registax. Het resultaat kan je hieronder vinden waarbij ik in een rotatie de verschillende resultaten heb gezet.
Alhoewel we niet kunnen stellen dat we alle details kunnen zien, krijgen we toch wel meer structuur in de zon. We zien verschillende gekleurde zones en we zien rond de zonnevlekken duidelijke structuren. Samengevat, de Seestar blijft toch een leuke telescoop met vele mogelijkheden.
![SIMPLE = T / file does conform to FITS standard
BITPIX = 20 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1200 / length of data axis 1
NAXIS2 = 1200 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2025-01-03T14:24:51' / UTC date that FITS file was created
INSTRUME= ' ' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= ' ' / telescope used to acquire this image
ROWORDER= 'TOP-DOWN' / Order of the rows in image array
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 251.984 / Camera focal length
CCD-TEMP= 0 / CCD temp in C
SET-TEMP= 0 / Temperature setting in C
HISTORY TOP-DOWN mirror
HISTORY GHS pivot: 0.550, amount: 3.22, local: 0.00 [0.00 1.00]
END](https://www.vvscapella.be/wp-content/gallery/2024_zon_seestar/zon_rotatev1.jpg)
![SIMPLE = T / file does conform to FITS standard
BITPIX = 20 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1200 / length of data axis 1
NAXIS2 = 1200 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2025-01-03T14:24:51' / UTC date that FITS file was created
INSTRUME= ' ' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= ' ' / telescope used to acquire this image
ROWORDER= 'TOP-DOWN' / Order of the rows in image array
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 251.984 / Camera focal length
CCD-TEMP= 0 / CCD temp in C
SET-TEMP= 0 / Temperature setting in C
HISTORY TOP-DOWN mirror
HISTORY GHS pivot: 0.550, amount: 3.22, local: 0.00 [0.00 1.00]
END](https://www.vvscapella.be/wp-content/gallery/2024_zon_seestar/zon_rotatev2.jpg)
![SIMPLE = T / file does conform to FITS standard
BITPIX = 20 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1200 / length of data axis 1
NAXIS2 = 1200 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2025-01-03T14:24:51' / UTC date that FITS file was created
INSTRUME= ' ' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= ' ' / telescope used to acquire this image
ROWORDER= 'TOP-DOWN' / Order of the rows in image array
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 251.984 / Camera focal length
CCD-TEMP= 0 / CCD temp in C
SET-TEMP= 0 / Temperature setting in C
HISTORY TOP-DOWN mirror
HISTORY GHS pivot: 0.550, amount: 3.22, local: 0.00 [0.00 1.00]
END](https://www.vvscapella.be/wp-content/gallery/2024_zon_seestar/zon_rotatev3.jpg)
![SIMPLE = T / file does conform to FITS standard
BITPIX = 20 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1200 / length of data axis 1
NAXIS2 = 1200 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2025-01-03T14:24:51' / UTC date that FITS file was created
INSTRUME= ' ' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= ' ' / telescope used to acquire this image
ROWORDER= 'TOP-DOWN' / Order of the rows in image array
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 251.984 / Camera focal length
CCD-TEMP= 0 / CCD temp in C
SET-TEMP= 0 / Temperature setting in C
HISTORY TOP-DOWN mirror
HISTORY GHS pivot: 0.550, amount: 3.22, local: 0.00 [0.00 1.00]
END](https://www.vvscapella.be/wp-content/gallery/2024_zon_seestar/zon_rotatev4.jpg)
Extra:
Tijdens de opnames blijken dus niet enkel satellieten een probleem te vormen, ook vliegtuigen kunnen dit doen. 😉

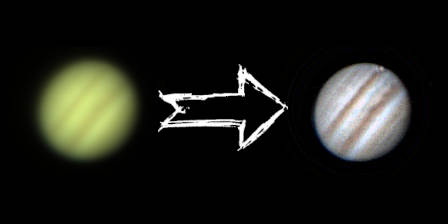
Verschil MAK180 vs MAK127 op Jupiter
Doordat Joost en mezelf op éénzelfde avond een opname deden van Jupiter met beiden een Skywatcher Maksutov met verschillende diameters evenals camera’s met dezelfde pixel grootte maar verschillende sensors, leek het me leuk om eens de verschillen tussen de opstellingen te bekijken. De berekeningen gebeurden op https://astronomy.tools/.
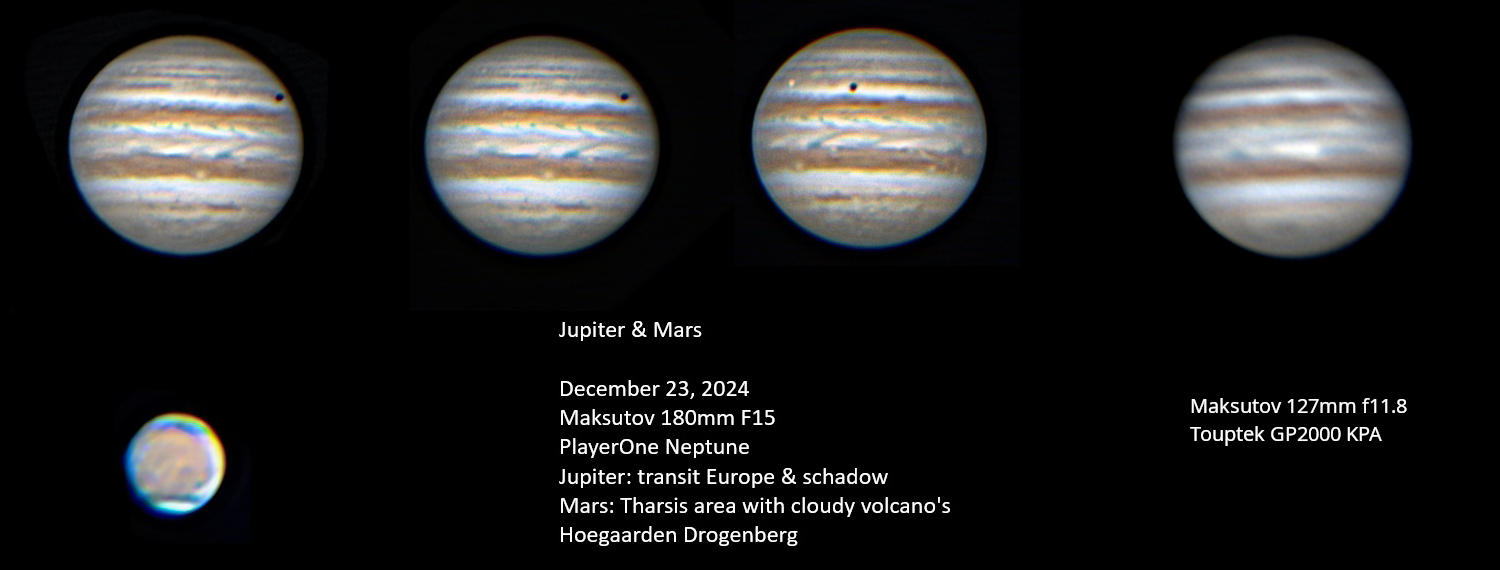
Zoals je hierboven kan zien, toont de kleinere Mak veel minder details, maar we hadden toch dezelfde pixelsize enzo? Hoe zit dat nu?
De technische gegevens van de 2 opstellingen:
- PlayerOne: SONY IMX664 1/1.8″ CMOS, 2704×1540, 7.8mm×4.5mm, 2.9µm
Op een Skywatcher MAK180/2700 - Touptek: Aptina IMX290, 1920×1080, 5,6 x 3,1, 2.9µm
Op een Skywatcher MAK127/1500
- Hoeveel licht kan de telescoop ontvangen
Omdat het glasoppervlakte een kwadraat is van de straal, kan je snel berekenen dat de MAK180 ten opzichte van de MAK127 2x zoveel fotonen zal ontvangen. (180²/127²) Nu is het natuurlijk zo dat je bij planeten iets minder problemen hebt met het aantal fotonen wegens de helderheid van het object. - FOV of Field of View
Deze is 0.17°x0.09° voor de MAK180 tov 0.21°x0.12° voor de MAK127. Beiden zijn oversampled maar bij de MAK180 is dit veel sterker waardoor guidances uitdagender is. Wegens de manier van stacking en het feit dat we snelle frames nemen, speelt dit iets minder mee. Wel een uitdaging voor DSO. (deep sky) - Resolutie
Alhoewel beide camera’s dezelfde pixel grootte hebben, is de IMX664 iets groter dan de IMX290. De MAK127 heeft een resolutie van 0.4″/pixel terwijl de MAK180 tot een resolutie gaat van 0.22″/pixel. Hierdoor zie je dus in de foto’s beter de wolkenlijnen.
We kunnen dus wel samenvatten met de bovenstaande beelden dat de uitspraak “size matters” ook op planeten geldig blijft. De hogere resolutie van de grotere MAK zorgt voor meer details in de wolken. Natuurlijk speelt de bewerking van de beelden ook wel een rol, evenals de seeing op het moment van beide opnames, maar het resultaat zal ongeveer hetzelfde blijven.
Weinig tijd, maximaal resultaat (planeten)
De laatste weken is het sprokkelen om nog eens een moment van opnames te vinden. Op donderdag 19 dec zie ik rond 19u30 eventjes sterren en planeten aan de hemel. Toch zijn de voorspellingen niet goed dus neem ik mijn Skywatcher MAK127/1500 eventjes uit zijn tas in combinatie met mijn Manfrotto en probeer ik een snelle visuele observatie te doen.

Omdat ik op een azimuth statief sta, is het even wat sukkelen om Jupiter en Venus te volgen maar toch zie ik visueel wel twee bruine strepen bij Jupiter en een hap uit Venus. Even de GSM op de focus leggen en proberen deze ervaring vast te leggen.
Na het gesukkel met de GSM, krijg ik toch wel de goesting om een beeld vast te leggen. Daarom neem ik mijn manuele EQ5 statief en zet daarop MAK127/1500 met een Touptek GP2000 camera aangesloten op Sharpcap. De tijd om de motoren aan te sturen, is verloren tijd dus ga ik volledig manueel aan de slag. Ik maak dan ook 3 filmpjes van 45 sec.
Na het bekijken van enkele filmpjes (zie hieronder), krijg ik een idee van hoe ik alles moet aanpakken.
https://youtu.be/g67DfADSWvA?si=dADzIQCwK4sKhoGe
https://youtu.be/SwYOnAHPWbw?si=G_zvR2glqTL_z2Jt
De stappen die ik neem zijn PIPP om Jupiter centraal in het filmpje te zetten. De volgende stap is het stacken van de frames met Autostakkert. Versie 4 bleek voor mij niet te werken dus versie 3 gebruikt. Het resultaat is een geel-groene planeet. Hmmm. Eigenlijk niet veel meer dan wat ik visueel kon waarnemen. Deze foto openen in Gimp maar de kleurbalans en scherpstelling veranderen niet.
Bij het bekijken van het tweede filmpje wordt de kracht van Registax6 nogmaals uitgelegd. Registax6 heeft een andere manier van aanpak waarbij we met Gauss curves gaan werken. Hierbij gaan we foto in verschillende lagen opdelen op basis van details in de foto en deze kan je dan per laag bijsturen op scherpte en ruis. Met de tips uit de youtube ga ik aan de slag. Het eindresultaat van 10 minuten werk kan je hieronder vinden.

Alhoewel we maar spreken van 50 seconden opnames met een bescheiden installatie, is het resultaat toch wel mooi. Nu terug door het venster kijken naar de volgende kans tot opnames.
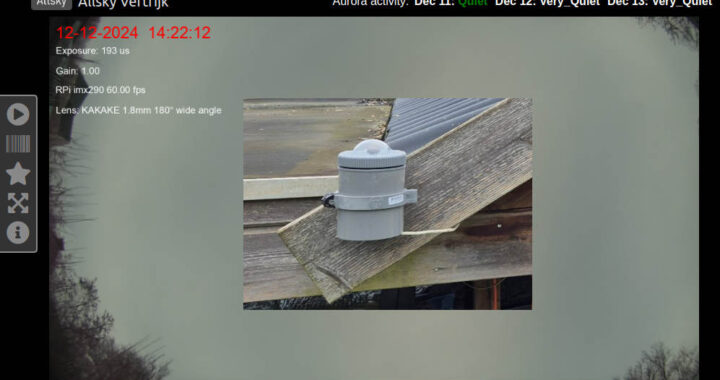
Allsky v2 camera zonder veel moeite
De Allsky camera’s zijn reeds ter sprake gekomen in vorige posts en vergadering.
Een leuke implementatie is de Allsky voor Raspberry. Installatie, zie website. (https://github.com/AllskyTeam/allsky)
Deze implementatie koppelt een goedkope mini-computer (PI) aan een nog goedkopere camera met toch wel mooie resultaten en een gemakkelijke gebruikersinterface.
Voor mijn eerste versie van Allsky (lees hier), heb ik nog gebruik gemaakt van losse onderdelen die met creativiteit met elkaar werden gekoppeld. Origineel had ik een PIv3 met een eenvoudig HD camera gebruikt, maar dan vervangen door een PIv4 met een IMX378 chip.
Na een succesvolle implementatie, zag ik een email van een ander lid van de club met de vraag naar PoE. Deze denkpiste vond ik wel interessant en daarom heb ik het met Allsky v2 over een andere boeg gesmeten. Voor deze build zou ik gaan naar onderdelen waar ik bijna geen werk aan had. Zoals je hieronder kan zien, heb ik gewerkt met waterbuizen en is de PI3 gewoon via een PoE adaptor naar UTP/microUSB aangesloten. Ik heb dus ook maar 1 UTP kabel naar de Allsky camera. De dome is een acryl kerstbal (vond niks anders) waardoor ik nu nog 23 reserve-koepeltjes heb. 😉 Deze dan met silicone vastgezet op het deksel van de waterbuis.
Demo: https://allsky.kawanda.be/allsky

Ingrediënten:
- 3 waterbuizen (3.79 € +7.99 € + 4.49 €)
- Bevestigingsbeugel (3.69 €)
- Transparante silicone (6.79 €)
- 12 acryl kerstballen 60mm (16,48 €) > kunnen open voor eigen decoratie
- 1.8mm 180° wide angle lens voor CCTV cameras (10.79 €)
- IMX290 RPI camera (16 €)
- Raspberry 3 (42 €)
- SD-card (8.40 €)
- PoE adaptor naar Ethernet + USB micro-USB (11.36 €)
Totaal dus: 120.42 EUR

Deconvolutie is een wonder
Deconvolutie is een techniek waarbij je met wiskunde de spreiding van je signaal over de verschillende pixels gaat bekijken en het originele signaal gaat herconstrueren. Het is een zeer intensieve berekening en beschikbaar in de meeste post-bewerkingssoftware zoals Siril, PixInsight en Photoshop. Hiervoor gebruik je vooral je CPU van de computer.
Over de laatste maanden/jaren hebben we de opkomst gezien van AI (artificiële intelligentie) in onze hobby. Hierbij gaat AI ‘verloren’ informatie op basis van gekende patronen opnieuw aanvullen. Hierbij wordt de AI getrained op typische astro foto’s en leert het AI process hoe hij best deze informatie kan aanvullen. Omdat AI een iteratief process is van telkens vergelijken en verbanden leggen, werken we hier met veel parallele berekeningen en daarvoor is een GPU (videokaart) weer veel beter geschikt.
Met een moderne computer krijg je tegenwoordig een stevige CPU en GPU en hierdoor kunnen we verborgen informatie in onze astro foto’s toch tevoorschijn toveren.
De meest gekende software is betalend en beschikbaar als plugin van PixInsight.
Hierbij denken we aan BlurXterminator en NoiseXterminator van RC Astro.
De kost van PI + RC Astro is een stevige 500$/€. De plugins van RC Astro en PI zijn gekend voor hun kwaliteit en zeker hun geld waard.
Toch zien we ook een stroming op de markt van opensource aanbieders die met vrije schenking werken. Hierbij denk ik aan Siril, Gimp, GraXpert, Cosmic Clarity en Starnet++ die hun software gratis ter beschikking stellen met mooie resultaten.
Wat met die deconvolutie en hoe gebruiken?
Deconvolutie zit al een tijdje in Siril maar bij het gebruik kon ik niet echt veel verschil merken. Dit is dus de wiskundige versie zonder AI.
Op verschillende forums en Youtube wordt echter de Cosmic Clarity versie (https://www.setiastro.com/cosmic-clarity) aangeraden dus was het tijd om eens te proberen en wonder…. het werkt ongelooflijk goed. Waar Cuiv (Lazy Geek) nog klachten had over het gebruik bij lineair (non stretched) foto’s, lijkt de nieuwere AI versie die problemen achter zich te hebben gelaten.
Zoals je hieronder kan zien, heb je links de opname zonder deconvolutie en rechts de opname met deconvolutie. Bij de linkse zie je dat de sterren veel vetter zijn en we missen veel details in de kern van de Iris Nebula. De randen van de nevels zijn ook veel beter afgelijnd. Op beiden heb ik ook denoise losgelaten, maar links was het effect veel minder wegens de minder goede basis. Merk ook op dat de opnames zijn gemaakt op een avond met minder goede seeing met 30 lights van 3 min dus totale integratie van 1u30.

Welke workflow heb ik gevolgd voor de opname?
- Stacking in Siril (geen flats, biases, darks).
- Photometric color calibration in Siril (voor de correcte balans tussen de 3 kleuren)
- Deconvolution in Cosmic Clarity
- Background extractie en denoise in GraXpert
- Weghalen sterren (starmask) in Siril (via plugin van Starnet++)
- Generic Hyperbolic Stretching (linear > stretched) in Siril
- Verdere stretching en nog wat scherpte in Gimp
- De-saturatie van de sterrenlaag in Siril
- Samenvoegen van de sterrenlaag en nevel in Siril
Hieronder kan je het eindresultaat zien van een uurtje bewerken (wachttijd inbegrepen).
![SIMPLE = T / file does conform to FITS standard
BITPIX = -32 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 3856 / length of data axis 1
NAXIS2 = 2180 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
MIPS-FHI= 0.953368 / Upper visualization cutoff
MIPS-FLO= 0 / Lower visualization cutoff
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2024-10-24T18:43:42' / UTC date that FITS file was created
DATE-OBS= '2024-10-23T23:34:34.105000' / YYYY-MM-DDThh:mm:ss observation start,
INSTRUME= 'Uranus-C PRO' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= 'GSO 8" Newton' / telescope used to acquire this image
ROWORDER= 'TOP-DOWN' / Order of the rows in image array
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 810.345 / Camera focal length
CCD-TEMP= -10 / CCD temp in C
SET-TEMP= -10 / Temperature setting in C
EXPTIME = 120 / Exposure time [s]
STACKCNT= 40 / Stack frames
LIVETIME= 4800 / Exposure time after deadtime correction
EXPSTART= 2.46061e+06 / Exposure start time (standard Julian date)
EXPEND = 2.46061e+06 / Exposure end time (standard Julian date)
FILTER = 'mixed ' / Active filter name
IMAGETYP= 'LIGHT ' / Type of image
OBJECT = 'Iris Nebula' / Name of the object of interest
GAIN = 210 / Camera gain
OFFSET = 50 / Camera offset
SITELAT = 50.8074 / [deg] Observation site latitude
SITELONG= 46 / [deg] Observation site longitude
CTYPE1 = 'RA---TAN' / Coordinate type for the first axis
CTYPE2 = 'DEC--TAN' / Coordinate type for the second axis
CUNIT1 = 'deg ' / Unit of coordinates
CUNIT2 = 'deg ' / Unit of coordinates
EQUINOX = 2000 / Equatorial equinox
OBJCTRA = '21 01 47.773' / Image center Right Ascension (hms)
OBJCTDEC= '+68 10 15.718' / Image center Declination (dms)
RA = 315.449 / Image center Right Ascension (deg)
DEC = 68.171 / Image center Declination (deg)
CRPIX1 = 1928 / Axis1 reference pixel
CRPIX2 = 1090 / Axis2 reference pixel
CRVAL1 = 315.449 / Axis1 reference value (deg)
CRVAL2 = 68.171 / Axis2 reference value (deg)
CDELT1 = -0.000204994 / X pixel size (deg)
CDELT2 = 0.000205097 / Y pixel size (deg)
PC1_1 = -0.0241307 / Linear transformation matrix (1, 1)
PC1_2 = 1.0002 / Linear transformation matrix (1, 2)
PC2_1 = -0.99921 / Linear transformation matrix (2, 1)
PC2_2 = -0.0243312 / Linear transformation matrix (2, 2)
PLTSOLVD= T / Siril internal solve
AIRMASS = 1.42069 / Airmass
HISTORY Background extraction (Correction: Subtraction)
END](https://www.vvscapella.be/wp-content/gallery/deconvolutie/IrisNebula.jpg "SIMPLE = T / file does conform to FITS standard
BITPIX = -32 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 3856 / length of data axis 1
NAXIS2 = 2180 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
MIPS-FHI= 0.953368 / Upper visualization cutoff
MIPS-FLO= 0 / Lower visualization cutoff
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2024-10-24T18:43:42' / UTC date that FITS file was created
DATE-OBS= '2024-10-23T23:34:34.105000' / YYYY-MM-DDThh:mm:ss observation start,
INSTRUME= 'Uranus-C PRO' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= 'GSO 8\" Newton' / telescope used to acquire this image
ROWORDER= 'TOP-DOWN' / Order of the rows in image array
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 810.345 / Camera focal length
CCD-TEMP= -10 / CCD temp in C
SET-TEMP= -10 / Temperature setting in C
EXPTIME = 120 / Exposure time [s]
STACKCNT= 40 / Stack frames
LIVETIME= 4800 / Exposure time after deadtime correction
EXPSTART= 2.46061e+06 / Exposure start time (standard Julian date)
EXPEND = 2.46061e+06 / Exposure end time (standard Julian date)
FILTER = 'mixed ' / Active filter name
IMAGETYP= 'LIGHT ' / Type of image
OBJECT = 'Iris Nebula' / Name of the object of interest
GAIN = 210 / Camera gain
OFFSET = 50 / Camera offset
SITELAT = 50.8074 / [deg] Observation site latitude
SITELONG= 46 / [deg] Observation site longitude
CTYPE1 = 'RA---TAN' / Coordinate type for the first axis
CTYPE2 = 'DEC--TAN' / Coordinate type for the second axis
CUNIT1 = 'deg ' / Unit of coordinates
CUNIT2 = 'deg ' / Unit of coordinates
EQUINOX = 2000 / Equatorial equinox
OBJCTRA = '21 01 47.773' / Image center Right Ascension (hms)
OBJCTDEC= '+68 10 15.718' / Image center Declination (dms)
RA = 315.449 / Image center Right Ascension (deg)
DEC = 68.171 / Image center Declination (deg)
CRPIX1 = 1928 / Axis1 reference pixel
CRPIX2 = 1090 / Axis2 reference pixel
CRVAL1 = 315.449 / Axis1 reference value (deg)
CRVAL2 = 68.171 / Axis2 reference value (deg)
CDELT1 = -0.000204994 / X pixel size (deg)
CDELT2 = 0.000205097 / Y pixel size (deg)
PC1_1 = -0.0241307 / Linear transformation matrix (1, 1)
PC1_2 = 1.0002 / Linear transformation matrix (1, 2)
PC2_1 = -0.99921 / Linear transformation matrix (2, 1)
PC2_2 = -0.0243312 / Linear transformation matrix (2, 2)
PLTSOLVD= T / Siril internal solve
AIRMASS = 1.42069 / Airmass
HISTORY Background extraction (Correction: Subtraction)
END")

Ik hoop dat dit iedereen kan helpen om meer uit de opnames te halen.
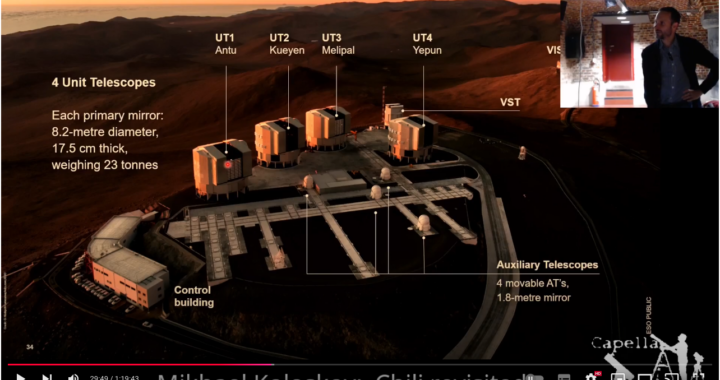
A trip to Paranal observatory (Chili) by Mikhael Koloskov
Presentation on the visit to ESO (European Southern Hemisphere Observatory) in Chili hosting the biggest telescopes on earth.